")
第一步:写下你的想法。
第一步是如何制造这个机器人。构建所需的所有组件是什么?
我在一张纸上以流程图的形式设计了一个粗略的想法。
我决定了我需要的所有功能机器人,以及未来我可以做出哪些改进。
我也希望这个机器人可以即插即用,让孩子们可以和它一起玩,一起玩,一起认识它。
因为它它是由arduino制成的。它这很容易理解。
这个机器人也是全封闭的,所以非常安全。
所以它所有的都在我的脑海里,我写下的想法。
我附上了图片,这样你可以更好地了解这个项目。
步骤2:收集您的组件
以下是必需的组件:-
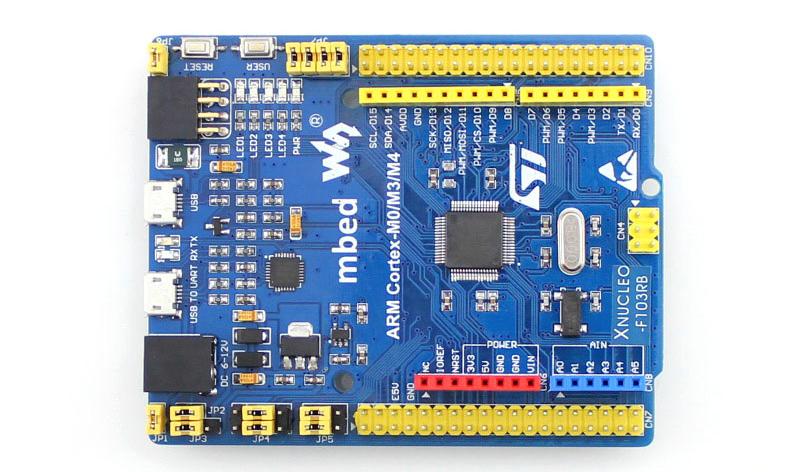
Arduino Pro迷你5v/16 MHz - (x1)
HC-05蓝牙模块-(x1)
8650锂离子电池-(x1)
博DC减速电机300转分-(x2)
2个车轮或轮胎-(x2)
T DPDT翘板开关-(x1)
SX1308升压模块-(x1)
TP4056充电模块-(x1)
6毫米香蕉插座内螺纹-(x2)
终端-(x3)
伯格男性和女性-(x1)
Sg90伺服电机-(x1)
发光二极管- (x5)
1K电阻-(x3)
10K电阻-(x5)
L293d电机驱动器IC-(x1)
跳高运动员
带状电线
HC-SR04距离传感器模块-(x1)
3 X 2 PCB Veroboard - (x1)
第三步:所需工具
以下是构建所需的工具:-
M4内六角螺栓-(x4)
M3六角凹头螺栓和螺母-(x10)
万用表
文件
剪钳
剥皮钳
熨斗
焊料
部分螺钉
FTDI模块
脚轮
螺丝刀
艾伦内六角扳手
三维打印
3D打印细丝
步骤4:需要软件和应用程序
以下是所需的软件:-
融合360
Arduino IDE
烧结
通过Keuwl软件的蓝牙电子应用
简化3D或任何其他切片软件
安卓应用的链接位于以下位置:-https://play . Google . com/store/apps/details?id=com .
第五步:电路
电路是我设计的,因为软件可以免费使用,新手用起来非常方便。
这个版本的功能不错。
我附上了fritzing文件。
如你所知,有些部分丢失了,所以我手动绘制纸张不同部分的接线。
请务必仔细检查原理图。
以下是附加的示意图文件:
步骤6:电路的操作
电路的工作非常简单,但非常有趣和直观。这就是它的工作原理
机器人的大脑是arduino pro mini。机器人通过蓝牙模块进行无线通信。
蓝牙模块与智能手机配对,使用蓝牙向机器人传输数据。
Arduino然后处理数据,然后按照代码中的描述打开或关闭电机。
电源方面,我用了两个并联的锂离子电池,这样就产生了一个3.7v 4400 mah的光源。
Sx1308升压模块用于将电压从3.7升至7v。然后,这个升压后的电压被传输到arduino的原引脚,再给Arduino板卡、伺服电机、距离传感器、蓝牙模块供电。
对于电池充电,我使用TP4056充电器模块,在大约5个小时内将这些电池从完全耗尽充电到充满电!
TP4056模块可以通过智能手机充电器或香蕉母端子供电。
L293D H桥电机驱动器IC用于驱动电机I.这是因为arduino可以处理电机运行所需的电流。
对于自动移动,机器人使用距离传感器模块。当应用程序中的按钮被激活时,机器人转向,然后以自主模式行驶。如果它发现了一个障碍,而不是停下来左右转动它的头,然后它决定应该继续前进。
第七步:设计一个机器人。
为了设计机器人,我使用了Fusion 360软件,因为它可以免费使用,非常人性化。
首先,我大致知道每个组件的大小和位置。
然后我开始模拟它的身体,它有一个顶部封闭盖和一个底部底盘作为主要部件。
为了让整个建模简单易懂,我还在Fusion 360里做了一个动画文章,展示了整个机器人是如何组装的。
我制作的锂离子电池支架是用来使用M3螺栓和螺母将电池固定到底盘上的。
距离传感器的安装支架也安装在伺服电机上。
我还对组件进行了3D建模,这样我就可以组装它们,并看到它们按预期工作。
我已经附上了融合设计,所以你也可以根据需要编辑和使用它。
第八步:3D打印
我使用simplify3D来切片Stl文件,但是您可以使用与您的3D打印机兼容的任何其他切片软件。
我有一台超级便宜的Anet A8 3d打印机,我用的是e sun Pla。我已经附上了所有3d打印模型的stl文件。
以下是我的打印机上的打印设置:-
填充=30%
层高=0.2毫米
印刷速度=60米/秒
底盘组件上印有支架。
第九步:组装
组装电路:-
根据原理图收集所有元件,开始组装电路。
将Sx 1308的输出电压调整至7 v。
然后将其连接到电路板上的两个电源输入端子。
将电路组装在32 PCB上,并通过DPDT开关将导线焊接到TP4056模块上。
我已经连接了DPDT开关布线供您参考。
给机器人充电,朝一个方向轻弹开关,然后让机器人朝相反方向轻弹开关。
装配机器人:-
首先,从3D中取出3D打印零件打印机床。
首先,装上电池,然后用两个内六角螺栓和螺母固定电池座。
然后用合适的M3螺栓将DC电机连接到底盘上。然后把轮胎装到电机轴上。
然后使用三个M3螺栓和螺母添加脚轮,然后添加电路并用螺母和螺栓固定。
将顶盖伺服电机加到切口上,然后在上面安装超声波距离传感器。
然后添加开关等部件,完成硬件建设。
第十步:给机器人编程。
打开arduino IDE软件,然后使用我的草图和使用FTDI分线板对arduino pro mini进行编程。
将代码上传到arduino时,请务必断开蓝牙模块,因为arduino无法同时与PC和蓝牙模块通信。
上传代码后,重新连接蓝牙模块。
这是arduino草图
第十一步:申请
我用的应用是Keuwl soft开发的蓝牙电子产品。
这个应用程序是高度可定制的,非常容易使用。
为了与蓝牙模块通信,我们必须进行一些更改。
我附上了一系列可以复制设置的照片。
步骤12:结束
所以你有了,你有了自己的3D打印Arduino机器人。
所附代码是基本代码,可能会被修改。
你可能想知道为什么机器人前面有个洞。
那个空间是用来添加某种显示的,这样我就可以给我的机器人一些表情。